Sandworm is a collaborative investigation into the tangible table paradigm. Tangible tables combine analog and digital modelling, usually by employing a pliable physical medium, such as sand or clay, alongside a 3D scanner to create a continuously updated 3D model. The sandbox model is then analysed by a computer that uses an overhead projector to visualise information on top of the physical model.
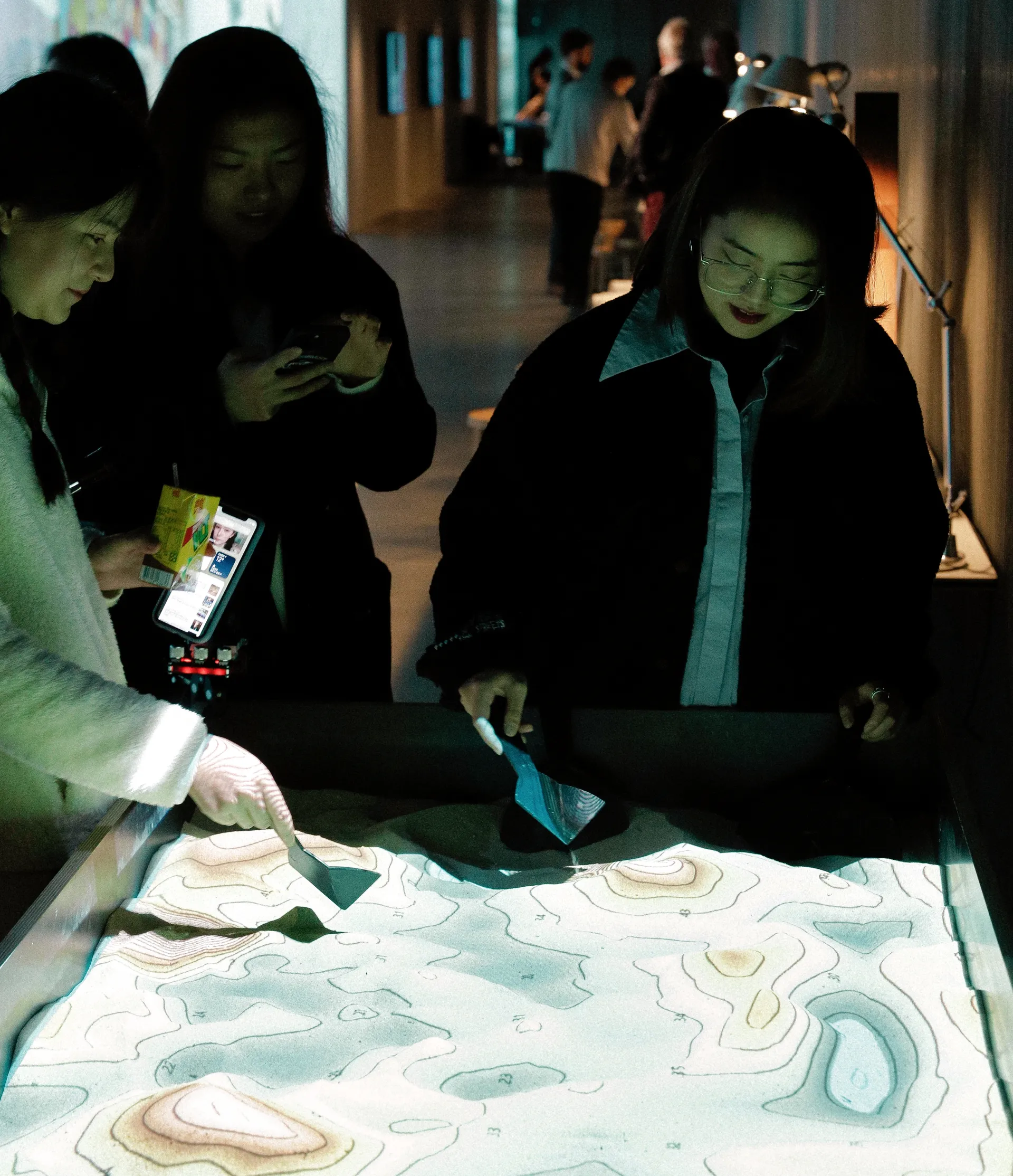
Figure .
Figure . A Sandworm-powered tangible table, visualising elevation. Shown at the RMIT Landscape Architecture End of Semester Exhibition, photograph by Nikolaus Tirtono.
This particular format of augmented reality has been explored for over two decades. In the wild, tangible tables are often used to create interactive learning tools that tend to focus on teaching geography because topographic models are readily understood by an overhead 3D scanner.
Other projects have explored the use of tangible tables as design tools in urban planning and landscape architecture. The work of Bradley Cantrell and his collaborators is the most prominent and sustained investigation, with a focus on the use of tangible tables as analog computers for testing hydrodynamics. This work harkens back to the large-scale models developed by the U.S. Army Corps of Engineers and targets a key gap in digital tooling: that computational fluid dynamics tools still require a great deal of expertise and computing power to employ.
In contrast, the goals of Sandworm were to make the tangible table paradigm much more accessible and much more focused on common design tasks. We saw its value as a 'best of both worlds' approach that hybridises analog and digital modelling and enables landscape architects to design landform with an intuitive and collaborative medium — in contrast to the still-stilted process of working landform in CAD. At the same time, the immediacy of the physical model can still draw from the wealth of analytic and generative tools available within 3D modelling platforms.
To these ends, Sandworm was designed to run as a plugin within Grasshopper, a popular visual programming tool for the Rhinoceros 3D modelling environment. It supports the first-generation Kinect camera that is cheap and accessible, as well as the more advanced Kinect for Azure.
Sandworm does a lot of low-level optimisation work to maximise the responsiveness of its capture/render cycle in a CAD environment where real-time outputs are unusual. To maximise performance, it integrates a range of analytics into its capture loop. At the same time, it outputs a typical mesh geometry that allows users to integrate the table's output into their existing parametric models or to apply their own analysis.
Sandworm was initiated by Mariusz Hermansdorfer as part of his PhD studies at the University of Copenhagen and the Ramboll Group. Other collaborators include myself and Kane Borg.
Sandworm is available on Github and has been exhibited at the Australian Centre for the Moving Image, Melbourne Design Week, and Helsinki Design Week. It also features in this Archdaily interview with Jakob Strømann-Andersen of Henning Larsen.